
 设为首页
设为首页 加入收藏
加入收藏

Cloud Base Height Measurement Methods Based on Dual-camera Stereovision
-
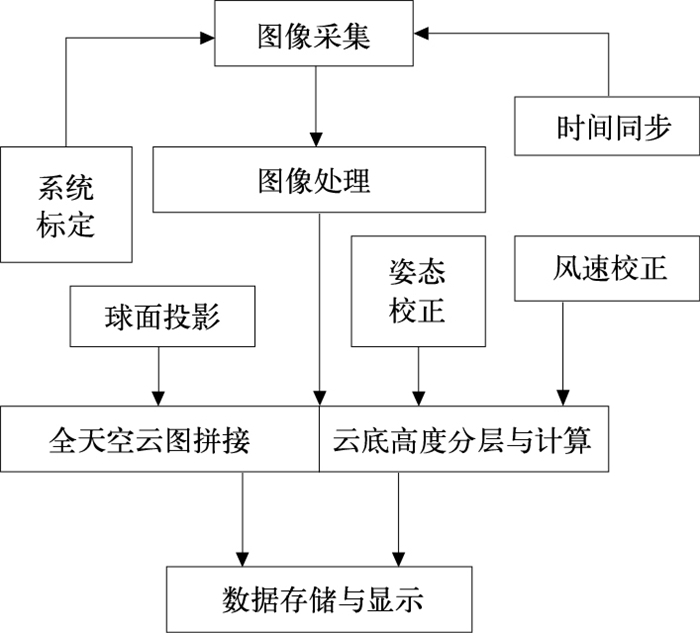
摘要: 采用基线长为60 m的一对数字摄像机,构成双目成像云底高度测量系统,随着数字摄像技术和立体视觉传感器的发展,尤其是双目成像视觉传感器以结构简单、使用方便、测量精度高等诸多优点而被广泛应用。通过直方图均衡化方法对图像进行增强,利用亚像素角点检测器检测角点提高测量精度,并采用归一化互相关方法进行区域相关检测寻找同名点,将外极线约束引入图像匹配过程中进行同名点粗差去除,提高测量准确度;再根据匹配特征点得到相对视差,利用摄影测量原理计算云底高度;建立三维实验室标校场对相机进行内外方位元素标校,利用星星相对位置与相机姿态角的关系对相机进行现场标校,简化标校系统提高测量精度。利用2011年5月1日—6月30日采集的样本,在北京市观象台与维萨拉生产的CL31激光云高仪进行对比试验,并对产生云底高度测量系统误差的可能原因做出具体分析。Abstract: A pair of digital cameras whose baseline length are 60 meters are used to constitute a binocular imaging cloud base height measurement system, which can be used in image acquisition, processing, calibration, the whole sky cloud image splicing, cloud high layer and calculation and data storage and terminal display, etc. Along with the digital camera technology and stereoscopic vision sensor development, binocular imaging visual sensor is widely used because of its simple structure, good usability and higher measuring accuracy. Through the laboratory calibration and field calibration for internal and external bearing elements, obtaining two cameras inside, outside elements and relative attitude angle, the measurement accuracy are improved. The CCD acquisition cloud image has some disadvantages such as poor texture and low signal-to-noise ratio, therefore, image enhancement and filtering pretreatment should be carried out to meet the image feature extraction and matching requirements. Through the method of histogram equalization to enhance the images, sub-pixel corner point detector are used to improve the measurement precision. The normalized cross-correlation method for regional correlation are adopted for same name point detection, which will be eliminated by introducing the polar constraint reference to image matching process.Then according to the matching feature points, getting relative parallax, height of cloud base can be calculated by use of photography measurement principle. The cameras are calibrated in lab for internal and external elements first, then calibrated using the star relative position and attitude angle of camera relationship on the spot, which ensures the measurement precision. In Beijing, with CL31 ceilometer for contrast test, concrete analysis are carried out to investigate the system error and possible causes for this cloud height measurement system.Binocular imaging cloud base high measuring methods is direct photogrammetry method, which has overcome the poor accuracy of passive remote sensing and improved the measuring accuracy. According to the analysis, the accuracy can be improved through improving camera resolution, calibrating the internal and external elements of camera, correcting relative attitude angles of the two cameras, and controlling sample synchronization time and so on.However, visible light image sensor is greatly influenced by light and obstruction, which is only suitable in a daylight and when the cloud image texture is clear. In order to reduce the influence of illumination and improve data acquisition rate, infrared image sensor can be used to constitute a binocular imaging cloud base high measuring system, to realize cloud base high measurement.
-
Key words:
- cloud base height;
- image processing;
- photogrammetry;
- field calibration
-
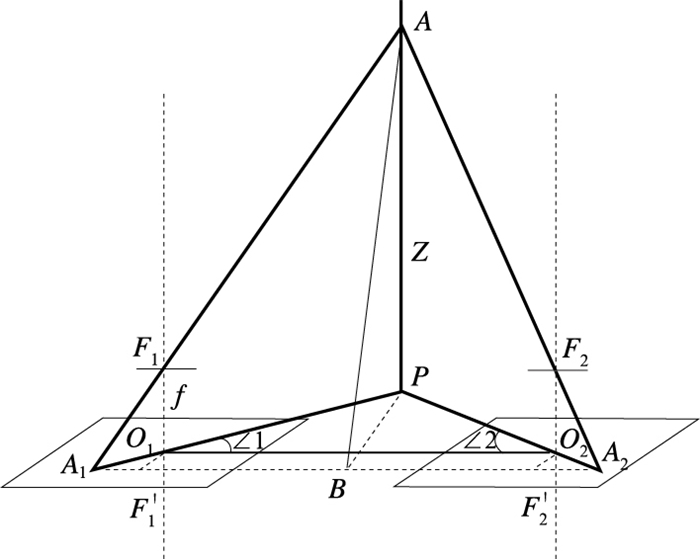
图 3 双目成像测距原理示意图
Fig. 3 The principle diagram of dual-camera stereovision distance measurement
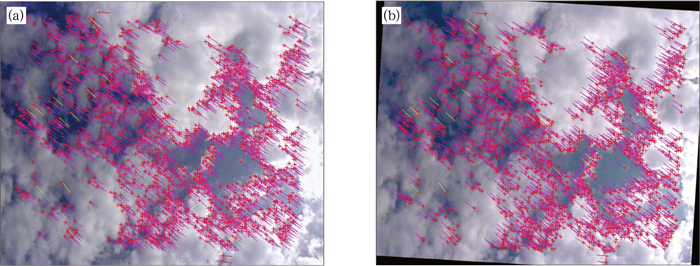
图 5 2011年5月10日10:32 (北京时,下同) 同一时刻两幅云图同名点 (同名点数为1713)
(a) 经过图像匹配之后的同名点图,(b) 经过旋转变换之后的同名点图
Fig. 5 The drawing of the closest points (the number: 1713) in two images at 1032 BT 10 May in 2011
(a) the closest points map through image matching, (b) the closest points map through rotation transformation
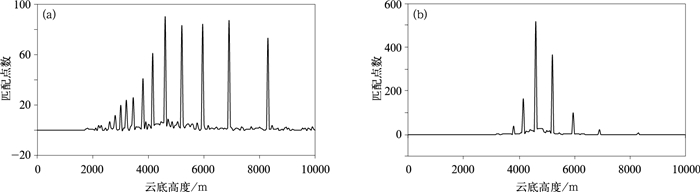
图 7 2011年5月10日10:32云图经过姿态角校正前 (a)、校正后 (b) 的云底高度直方图分布
Fig. 7 The histogram of cloud base height before (a) and after (b) attitude angle correction at 1032 BT 10 May 2011
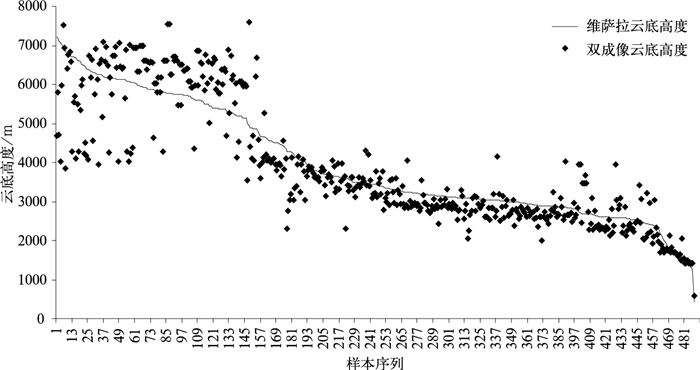
图 8 2011年5月1日—6月30日双成像云高仪与维萨拉激光云高仪云底高度对比分布
Fig. 8 Comparison of cloud base height by dual-camera stereovision and CL31 from 1 May to 30 June in 2011
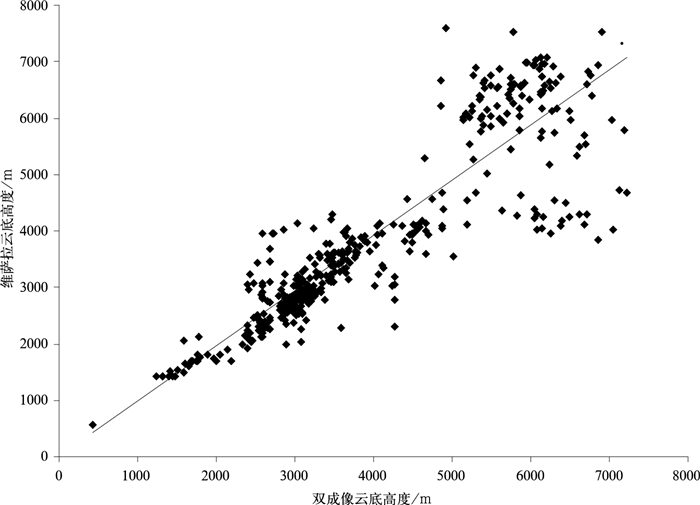
图 9 双成像云高仪与维萨拉激光云高仪云底高度散点图
Fig. 9 Scattered plot of cloud base height by dual-camera stereovision and CL31
表 1 某一时刻的星星位置
Table 1 The star positions
图像1星星位置 (x1, y1) 图像2星星位置 (x2, y2) (70, 326) (75, 298) (35, 376) (41, 350) (518, 238) (521, 192) (513, 352) (518, 306) 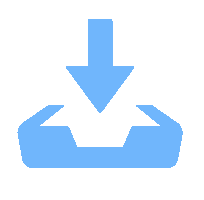 下载: 导出CSV
下载: 导出CSV
表 2 双成像云高仪相对于激光云高仪的误差统计 (单位:m)
Table 2 The error of cloud base height between dual-camera stereovision and CL31 (unit:m)
误差 高云 中云 低云 总样本 平均误差 46.5 -162.0 -18.9 -86.9 标准偏差 1109.0 455.5 301.9 715.9
下载: 导出CSV
表 3 2011年5月21日某时刻实测云迹风部分数据
Table 3 The data of cloud motion winds on 21 May 2011
订正前云底高度/m 风速/(m·s-1) 风向/(°) 2677.3 16.1 266.5 2709.6 18.3 266.8 2459.7 15.9 264.1 2721.1 16.0 265.6 2486.7 16.2 268.6 2507.0 15.1 264.5 2390.3 13.9 265.3
下载: 导出CSV
-
[1] 张春光, 张玉钧, 韩道文, 等.测云技术研究进展.光散射学报, 2007, 19(4):388-394. http://www.cnki.com.cn/Article/CJFDTOTAL-GSSX200704016.htm [2] 高太长, 刘磊, 赵世军, 等.全天空测云技术现状及进展.应用气象学报, 2010, 21(1):101-109. doi: 10.11898/1001-7313.20100114 [3] 张剑清, 潘励, 王树根.摄影测量学.武汉:武汉大学出版社, 2003. http://www.cnki.com.cn/Article/CJFDTOTAL-SYQY201603027.htm [4] Gabrlela S, Emmanuel P B, Annln G.Cloud mapping from the ground:Use of photogrammetric methods.Photogrammetric Engineering & Remote Sensing, 2002, 68(9):941-951. http://cat.inist.fr/?aModele=afficheN&cpsidt=13880221 [5] Mark C A, Philip K Jr.The computation of cloud-base height from paired whole-sky imaging cameras.Machine Vision and Applications, 1995, 9(4):160-165. doi: 10.1175/1520-0426%281996%29013<0097%3ATCOCBH>2.0.CO%3B2 [6] 谭涌波, 陶善昌, 吕伟涛, 等.双站数字摄像测量云底高度.应用气象学报, 2005, 16(5):629-637. doi: 10.11898/1001-7313.20050509 [7] 白晓宁.空中目标的双目立体视觉测距.西安:西安电子科技大学, 2004. [8] 王建华, 韩红艳, 王春平, 等.CCD双目立体视觉测量系统的理论研究.电光与控制, 2007, 14(4):95-116. http://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ200103025.htm [9] Harris C, Stephens M.A Combined Comer and Edge Detector.Proc 4th Alvey Vision Conference, 1988:147-151. https://zh.scribd.com/document/188806572/Harris-A-Combined-Corner-and-Edge-Detector [10] Tissainayagam Suter.Assessing the performance of corner detectors for point feature tracking applications.Image and Vision Computing, 2004, 22(8):663-679. doi: 10.1016/j.imavis.2004.02.001 [11] Lucchese L, Mitra S K.Using Saddle Points for Subpixel Feature Detection in Camera Calibration Targets.Proc of the 2002 Asia Pacific Conference on Circuits and Systems, 2002:191-195. http://ieeexplore.ieee.org/abstract/document/1115151/ [12] Chen Dazhi, Zhang Guangjun.A New Sub-Pixel Detector for X-Corners in Camera Calibration Targets.International Conference in Central Europe on Computer Graphics and Visualization—WSCG, 2005:97-100. https://www.researchgate.net/publication/221546505_A_New_Sub-Pixel_Detector_for_X-Corners_in_Camera_Calibration_Targets [13] Wang Sheyang, Song Shenmin, Qiang Wenyi, et al.Subpixel corner detection using spatial moment.Acta Automatica Sinica, 2005, 9, 31(5):714-719. http://en.cnki.com.cn/Article_en/CJFDTOTAL-MOTO200505009.htm [14] 梁志敏, 高洪明.摄像机标校中亚像素级角点检测算法.焊接学报, 2006, 27(2):102-104. http://www.cnki.com.cn/Article/CJFDTOTAL-JSSG200804042.htm [15] 邓志燕, 陈炽坤.利用外极线约束的图像匹配新算法.工程图学学报, 2009, 30(5):104-107. http://www.cnki.com.cn/Article/CJFDTOTAL-GCTX200905018.htm [16] 胡树贞, 马舒庆, 陶法, 等.地基双波段测云系统及其对比试验.应用气象学报, 2012, 23(4):441-449. doi: 10.11898/1001-7313.20120407 [17] 杨俊, 吕伟涛, 马颖, 等.基于自适应阈值的地基云自动检测方法.应用气象学报, 2009, 20(6):713-721. doi: 10.11898/1001-7313.20090609 -



计量
- 摘要浏览量: 2643
- HTML全文浏览量: 1080
- PDF下载量: 3047
- 被引次数: 0
